IMU
- Mobile Robot의 위치 제어를 위해서 주로 IMU 센서를 많이 사용한다.
- IMU(Inertial Measurement Unit)은 직역하면 '관성 측정 장치'이다.
- 관성을 측정하여 최종적으로 구하고자 하는 값은 물체가 기울어진 각도를 정확하게 측정하는 것이다.
- 또한 자이로스코프/가속도계/지자기센서로 구성된 센서를 뜻한다.
- 종류에 따라 자이로스코프 가속도계만 있는 6축 센서, 자이로스코프와 가속도계, 지자기센서까지 포함한 9축 센서도 있다.
1) 가속도 센서
- 물체에 작용하는 가속력과 진동력, 충격력 등 동적 힘이 발생했을 때, 움직임의 변화에 따른 가속도의 변화(단위: $m/s^2$)를 순간적으로 감지해 낸다.
- 센서에서 얻어지는 출력값인 가속도를 적분하여 물체의 진행 방향에 대한 속도를 계산할 수 있고, 이를 가공하면 물체의 위치를 알아낼 수 있다.
- 짧은 기간에 대한 오차는 적으나, 센서에서 얻은 가속도 값을 적분하므로 시간에 따라 오차가 누적되는 단점이 있다.
2) 자이로스코프(각속도 센서)
- 자이로스코프는 대표적인 관성 센서로, 물체의 회전 변화량인 각속도(단위: rad/s)를 측정한다.
- 자이로 스코프는 중력을 이용하여 코리올리 힘을 검출한다.
- 중력이 가해질 때 진동 속도가 변하는 것을 각속도로 계산해 질량과 진동 속도를 통해 값을 측정하여 검출할 수 있다.
각속도는 특정 축을 기준으로 했을 때의 초당 회전 각도라 이해하면 된다.
6자유도
- 6 자유도 (Six Degrees of Freedom, 6DOF)란 여섯 개의 운동 방향을 말하며, 로봇 공학기나 비행기, 선박 등에서 사용되는 개념이다.
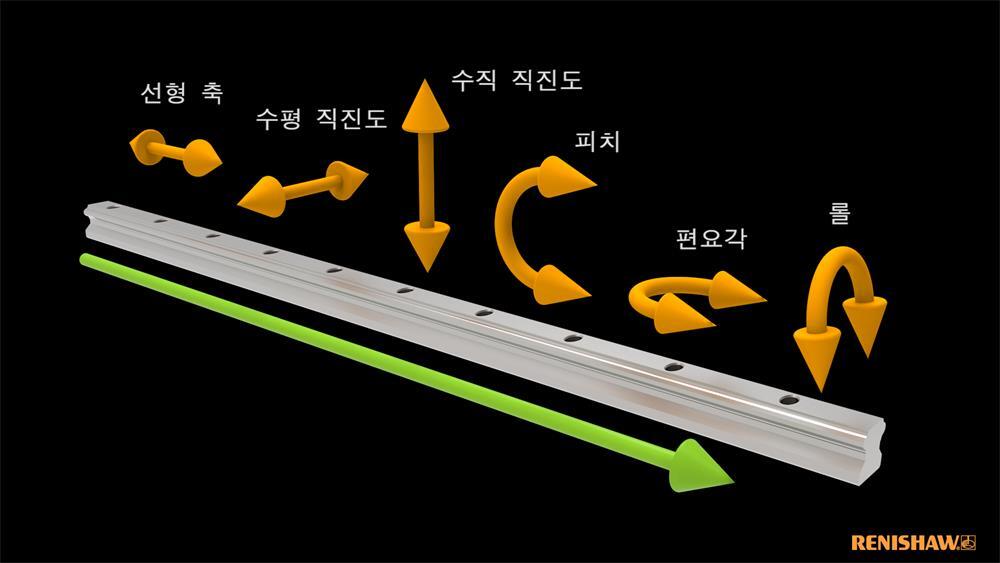
- 위치에 대하여 x,y,z 축 각각으로 선형 이동하는 Sway, Surge, Heave가 있고
- 회전(기울기) 에 대하여 x,y,z축 각각을 기준으로 회전하는 Pitch, Roll, Yaw가 있다.
ahrs
-ahrs는 IMU와 더불ㄹ어 내부적으로 센서 혼합 알고리즘 등을 통해 Roll, Pitch, 그리고 초기 자세로부터 회전한 상대적 Yaw 각도까지 출력할 수 있는 장치이다.
- 추가적으로 지자기 센서가 장착되어 정밀한 자이로스코프를 통해 절대적 Yaw를 출력할 수 있는 장치이다.
https://www.cv-learn.com/20220315-lidar-imu-pitfalls/
IMU와 LiDAR를 사용할 때 주의해야하는 점 (번역)
LiDAR와 IMU를 사용할 때 주의해야하는 점
www.cv-learn.com
일단 IMU는 다른 부분부터 진행을 하고 더 공부한 후에 구매를 진행할까 한다.
로봇의 위치 제어에 도움을 주는 중요한 센서라 더욱더 신중하게 구매해야 할 것 같다.
'Projects > 실내 자율 주행 로봇' 카테고리의 다른 글
| 프로젝트 일지 4. 모터 드라이버 선정 (0) | 2023.03.09 |
|---|---|
| 프로젝트 일지 3. 모터 구매 (0) | 2023.03.07 |
| 프로젝트 일지 2. 모터에 대한 이해. (0) | 2023.03.07 |
| 프로젝트 일지 1. 실내 자율 주행에 대한 이해. (0) | 2023.03.05 |

